
NO.11:基于Arduino的色彩追踪系统设计与实现---项目作者
////16物联网工程 汤旭
指导教师:李江洁
项目特色
该作品围绕“色彩追踪”和“智能应用”开展追踪系统设计,且较之目前相关学术领域已有的学术成果能够有所突破创新:
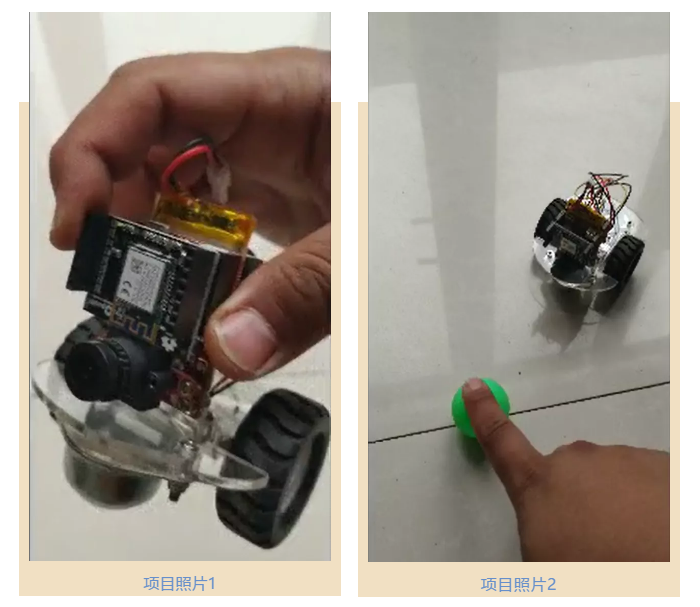
作品从机器视觉入手,目的是优化色彩识别算法和应用,对于色彩识别虽然仍然采用判断阈值的方法,但是在应用上区别于其他的色彩识别程序,可以使用算法对于识别精度进行优化,并以此为创新点展开设计。整合了色彩的误差值,将多种色彩的识别可拓展性体现出来。在论文的描述上从硬件的选型包括原因,软件程序的设计与注释,较为完整全面的描述了设计的全过程,逻辑清晰明了。
作品经过硬件设计选型,把设计目标放在机器视觉的硬件设备上面,这是根据需求进行设计的基础,同时也有一些可以根据不同环境和需求进行改变的光学摄像头,在硬件上引脚设计有着不错的可拓展性。在功能上还设计了无线数据传输的功能,使得实践性大大提高。该设计体现了很强的实践性,是合理的解决方案。
在中国,机器视觉的研究和应用正在逐步深入发展。关于硬件设计的研究更多的还是停留在学术交流和引进研究层面,技术应用实践并不多。但从未来的应用趋势看来,可以说色彩识别越来越需要高精度和高稳定性。通过基于硬件设计和软件研究的色彩识别追踪系统设计,该设计很好的实践硬件设计,可以为后来学者提供借鉴。
作品的最终解决方案运用了硬件设计的流程,主要经过3个关键环节,包括:硬件设计和选型、软件系统设计和实践、系统测试改良,这个服务设计流程源于经典的硬件设计流程。不仅在硬件选型上描述详细、选项原因明确,而且在软件设计和编程上也采用了算法进行优化,使得色彩识别的效果达到了预期的效果。
NO.12:基于STM32单片机的扫地机器人避障系统的设计---刘兆宇

////16通信工程 刘兆宇
指导教师:高秋红
项目特色
扫地机器人,是智能家用电器的一种,能通过自动行走和规避障碍,使用清洁工具,自动在房间内完成地板清理工作。而扫地机器人的智能化程度,很大一部分原因是取决于其避障系统的智能化程度,作者设计了一个融合超声、红外等多传感器的拥有手机控制、语音控制等多种控制方式的扫地机器人避障系统,完成了核心控制模块、 硬件及其软件的开发、制作与编程。
作品的硬件部分以STM32F103ZET6单片机作为主控芯片,使用ESP8266作为中继芯片还包括红外避障传感器、超声波测距传感器、步进电机、步进电机驱动器。同时配有LED、液晶屏、按键等显示交互接口。软件基于KEIL进行STM32开发、C语言进行ESP8266开发、AndroidStudio进行手机应用开发。整个系统通过UART串口和Socket通信。同时使用Android平台语音识别APP组成整个控制系统。设计方案中融合了当下很多的流行的先进技术,建立了一个具备自动避障、自动防跌落、语音控制行进动作的完整的机器人避障系统,有一定的创新性和原创性。创新点之一是将红外和超声传感器相互配合,达到完美的避障效果。创新点之二是完成了手机APP端的开发实现手机端和语音控制以及通过WIFI进行数据传输。







